The Game, is On! The DQN Trilogy-Part 1: The DQN
First part of the Trilogy
First, I have to give the proper credit to Udacity for making their Reinforcement Learning Nanodegree files open source in github. I used many of their codes
Hello! In this blog , I am trying to work on Deep Q Network. It was first introduced by Deepmind in 2013 which was later revised and published in Nature Journal. This is the first part of the Trilogy. Later parts are Double Deep Q Network and Duelling Double Deep Q Network
Index
- Background
- Bellman Update Equation
- The Game
- DQN
- Base Q Network Class
- Agent
- ReplayBuffer
- Learn Method
- DQN learning process
- DQN with target network
Prerequisites
To learn from this blog, some prerequisite knowledges are required
- Q learning. If you dont have intuition about Q learning , no problem. Look at this prequel!
- Deep Learning basics
Lets start!!
BackGround
Before starting full coding, let’s get a background check
The problem of Q Learning
The biggest problem with Q-learning is that,it only takes discrete inputs and gives discrete values as outputs. In the Mountain Car problem, we solved this issue by discretizing states which are actually continuous. But this can’t be done always. Specially when the states are multidimensional states or images. Deep learning comes here to solve this problem!
For example, breakout game by atari

Here , the states are the actual image itself! It is 210x160x3 size RGB numpy array. How will you make discrete for $Q learning$ ? Will that be efficient ? NO! . DQN comes us to save us!
So, we will replace the Q table explained in the last tutorial with a Neural Network. i.e. some thing like the following picture
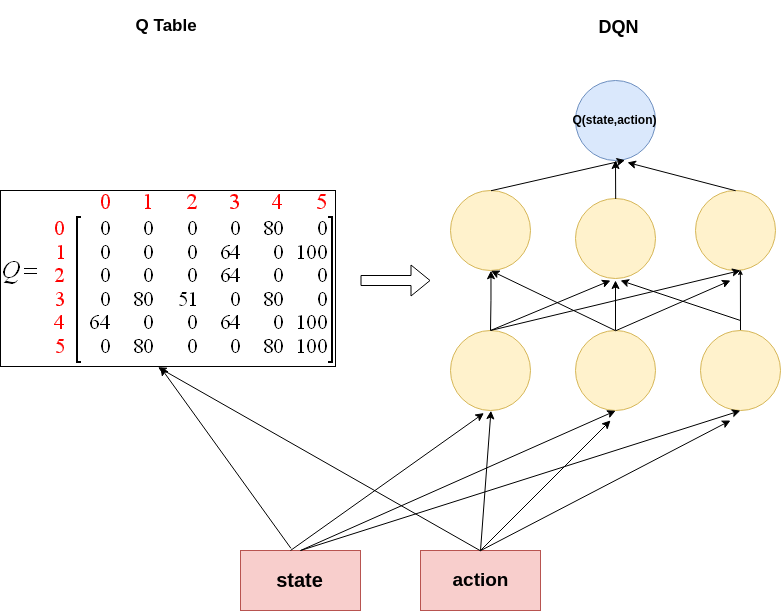
But there is one little problem!
In our mountain car problem, we have three discrete actions. $0,1 & 2$ . Using the above architecture, we will have to calculate $Q$ value for each action . Because , you need to take the action with best $Q$ value. To get the action of the best $Q$ value, you need to know the $Q(state,action)$ for each state! So in our case, we will have to run same feed forward process three times! action_list =[0,1,2] Q1 = QNetwork(state,action_list[0]) Q2 = QNetwork(state,action_list[1]) Q3 = QNetwork(state,action_list[2]) What if we have more 100 actions ? Will we feed forward 100 times! It is a bit inefficient!! Instead, we will use the following architecture.
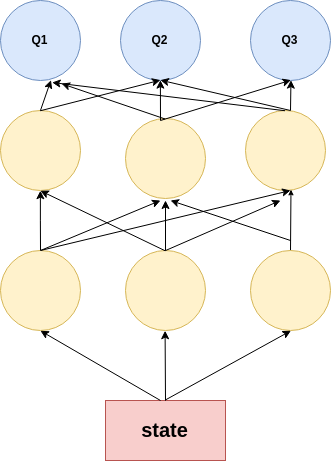
Meaning, our output layer will calculate $Q$ value for each action. As a result we can calculate Q values in one single forward pass each step! And then we will choose the action with maximum value action = argmax(Q(state))
Bellman Update Equation
In the Original Equation, the bellman update equation is \begin{equation} Q(s_t,a) = Q(s_t,a) + \alpha (r+\gamma max_a(Q(s_{t+1},a))-Q(s_t,a_t)) \end{equation}
For DQN, we will use similar equation, using Gradient descent \begin{equation} \theta_Q \gets \theta_Q - \alpha \frac{\partial}{\partial \theta}(r+ \gamma max_a(Q_{\theta}(s_{t+1},a))-Q_{\theta}(s_t,a))^2 \end{equation}
Here $\theta$ means weights and $Q_{\theta}$ means QNetwork model with weights $\theta$
If you are intelligent enough, then you may ask , why there is a squared part in the gradient descent equation but not in the actual bellman update equation? The reason might be, Mean squared errors are more sensitive to sudden spikes in the target data, which makes it most popular metric for regression models!
The Concept of Experience Replay
One of the problems in Reinforcment learning is relearning Problem. That is , suppose, in the course of trial and error, one state $s_t$ comes only once or twice, and never comes back. What will happen? There is a chance that the Agent will forget that experience after some time- like us! . So we need to make the agent keep some kind of track of that memory as well. This problem was solved in 1993- yes 26 years ago- by Long Ji lin. In his paper, Reinforcement Learning for Robots Using Neural Networks , he introduced the concept of Experience Replay. What he did was, he initialized a buffer of a certain size . He stored the experiences of the agent, i.e. state $s_t$, action $a$,next state $s_{t+1}$, reward $r$ . Before training the agent, he you just sample randomly from the buffer . It also helps randomizing the data , which in turn, helps to converge the model faster, as mentioned by Yoshua Bengio in his paper Practical Recommendations for Gradient-Based Training of Deep Architectures,2012
The concept of $\epsilon$-greedy Policy
In the beginning of training, we will have to explore random actions. Because we dont know the value of each action for each state. So we will take some random actions. We will evaluate those actions and see which random action gives us the most rewards. We will try to increase those actions. It means, at first you just explore different actions , the more you take actions the less you explore and more use your previouse experience to guide you-known as exploit. This thing can be done using a technique -with another freaking out name- $\epsilon$-greedy policy.
The big idea is that, we will select a value of $\epsilon$ , suppose $0.9$. Then we will generate a random floating point number . If the generated number is greater than $\epsilon$ we will take action according to the DQN, otherwise a random action. After each episode , we will decrease the value of $\epsilon$ . As a result , in the last episodes, the agent will take actions according to DQN model, not the random actions.
- Set $\epsilon$
- Generate random number $n_{rand}$
- if $n_{rand} < \epsilon$ do
-
- take random action
- else do
-
- take action according to DQN
Lets play the game!
The Game
For this blog I will be solving Lunarlander environment in open ai gym
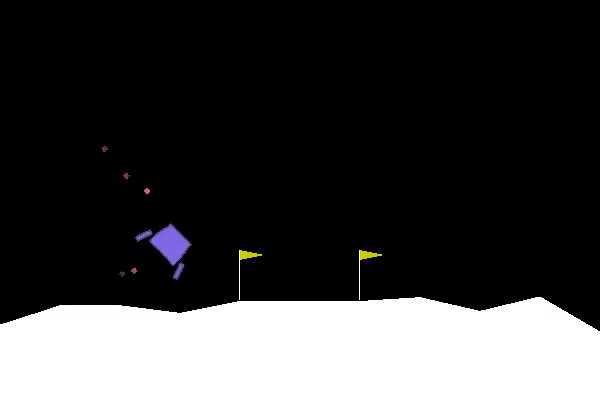
The goal is to land the ship in between the two flags properly.
From the gym open ai page, Landing pad is always at coordinates (0,0). Coordinates are the first two numbers in state vector. Reward for moving from the top of the screen to landing pad and zero speed is about 100..140 points. If lander moves away from landing pad it loses reward back. Episode finishes if the lander crashes or comes to rest, receiving additional -100 or +100 points. Each leg ground contact is +10. Firing main engine is -0.3 points each frame. Solved is 200 points. Landing outside landing pad is possible. Fuel is infinite, so an agent can learn to fly and then land on its first attempt. Four discrete actions available: do nothing, fire left orientation engine, fire main engine, fire right orientation engine.
- 0 do nothing
- 1 fire left orientation engine
- 2 fire main engine
- 3 fire right orientation engine
Importing packages
import gym
import random
import numpy as np
from collections import namedtuple, deque
import matplotlib.pyplot as plt
import torch
import torch.nn.functional as F
from torch import nn
import torch.optim as optim
%matplotlib inline
Initiating gym environment
env = gym.make('LunarLander-v2')
env.seed(0)
print('State shape: ', env.observation_space.shape)
print('Number of actions: ', env.action_space.n)
State shape: (8,)
Number of actions: 4
saving state_shape and actions_shape
state_shape= env.observation_space.shape[0]
action_size= env.action_space.n
DQN
Q Network class
Here , throughout the blog we will use same network named QNetwork . Well, not 100% . In duelling dqn we will make slight change! But thats for later! I am defining a model with 2 hidden layers, with relu activation. The final output is linear output same as action size
class QNetwork(nn.Module):
"""Actor (Policy) Model."""
def __init__(self, state_size, action_size, seed, fc1_units=150, fc2_units=120):
"""Initialize parameters and build model.
Params
======
state_size (int): Dimension of each state
action_size (int): Dimension of each action
seed (int): Random seed
fc1_units (int): Number of nodes in first hidden layer
fc2_units (int): Number of nodes in second hidden layer
"""
super(QNetwork, self).__init__()
self.seed = torch.manual_seed(seed)
self.fc1 = nn.Linear(state_size, fc1_units)
self.fc2 = nn.Linear(fc1_units, fc2_units)
self.final = nn.Linear(fc2_units, action_size)
def forward(self, state):
"""Build a network that maps state -> action values."""
x = F.relu(self.fc1(state))
x = F.relu(self.fc2(x))
return self.final(x)
Agent
Notice , I didnt define the methods __init__ , step , act and learn . I will define them later and add them to the same agent
device = torch.device("cuda:0" if torch.cuda.is_available() else "cpu")
class Agent():
"""Interacts with and learns from the environment."""
def __init__(self, state_size, action_size, seed):
pass
def step(self, state, action, reward, next_state, done):
pass
def act(self, state, eps=0.):
pass
def learn(self):
pass
Replaybuffer
Let’s first declare a class of Replaybuffer. I used Udacity RL ReplayBuffer class
class ReplayBuffer:
"""Fixed-size buffer to store experience tuples."""
def __init__(self, action_size, buffer_size, batch_size, seed):
"""Initialize a ReplayBuffer object.
Params
======
action_size (int): dimension of each action
buffer_size (int): maximum size of buffer
batch_size (int): size of each training batch
seed (int): random seed
"""
self.action_size = action_size
self.memory = deque(maxlen=buffer_size)
self.batch_size = batch_size
self.experience = namedtuple("Experience", field_names=["state", "action", "reward", "next_state", "done"])
self.seed = random.seed(seed)
def add(self, state, action, reward, next_state, done):
"""Add a new experience to memory."""
e = self.experience(state, action, reward, next_state, done)
self.memory.append(e)
def sample(self):
"""Randomly sample a batch of experiences from memory."""
experiences = random.sample(self.memory, k=self.batch_size)
states = torch.from_numpy(np.vstack([e.state for e in experiences if e is not None])).float().to(device)
actions = torch.from_numpy(np.vstack([e.action for e in experiences if e is not None])).long().to(device)
rewards = torch.from_numpy(np.vstack([e.reward for e in experiences if e is not None])).float().to(device)
next_states = torch.from_numpy(np.vstack([e.next_state for e in experiences if e is not None])).float().to(device)
dones = torch.from_numpy(np.vstack([e.done for e in experiences if e is not None]).astype(np.uint8)).float().to(device)
return (states, actions, rewards, next_states, dones)
def __len__(self):
"""Return the current size of internal memory."""
return len(self.memory)
Let’s make __init__ method for the Agent class
def __init__(self, state_size, action_size, seed):
"""Initialize an Agent object.
Params
======
state_size (int): dimension of each state
action_size (int): dimension of each action
seed (int): random seed
"""
self.state_size = state_size
self.action_size = action_size
self.seed = random.seed(seed)
# Q-Network
self.qnetwork_local = QNetwork(state_size, action_size, seed).to(device)
self.optimizer = optim.Adam(self.qnetwork_local.parameters(), lr=LR)
# Replay memory
self.memory = ReplayBuffer(action_size, BUFFER_SIZE, BATCH_SIZE, seed)
# Initialize time step (for updating every UPDATE_EVERY steps)
self.t_step = 0
self.criterion=nn.MSELoss()
Agent.__init__=__init__
Now the act method.
def act(self, state, eps=0.):
"""Returns actions for given state as per current policy.
Params
======
state (array_like): current state
eps (float): epsilon, for epsilon-greedy action selection
"""
state = torch.from_numpy(state).float().unsqueeze(0).to(device)
self.qnetwork_local.eval()
with torch.no_grad():
action_values = self.qnetwork_local(state)
self.qnetwork_local.train()
# Epsilon-greedy action selection
if random.random() > eps:
return np.argmax(action_values.cpu().data.numpy())
else:
return random.choice(np.arange(self.action_size))
Agent.act=act
And the step method
def step(self, state, action, reward, next_state, done):
# Save experience in replay memory
self.memory.add(state, action, reward, next_state, done)
# Learn every UPDATE_EVERY time steps.
self.t_step = (self.t_step + 1) % UPDATE_EVERY
if self.t_step == 0:
# If enough samples are available in memory, get random subset and learn
if len(self.memory) > BATCH_SIZE:
experiences = self.memory.sample()
self.learn(experiences, GAMMA)
Agent.step=step
The __init__,act and step methods are exactly as Udacity RL nanodegrees github repository coded. I only changed in the learn method
def learn(self, experiences, gamma):
"""Update value parameters using given batch of experience tuples.
Params
======
experiences (Tuple[torch.Tensor]): tuple of (s, a, r, s', done) tuples
gamma (float): discount factor
"""
states, actions, rewards, next_states, dones = experiences
"*** YOUR CODE HERE ***"
### My code starts###
maxQ1=torch.max(self.qnetwork_local(next_states),0)[0]
maxQ2=torch.max(self.qnetwork_local(next_states),1)[0]
maxQ=maxQ2.reshape(-1,1)
y=rewards+gamma*torch.max(maxQ,1)[0]*(1-dones)
loss=F.mse_loss(y,self.qnetwork_local(states).gather(1,actions))
self.optimizer.zero_grad()
loss.backward()
self.optimizer.step()
### My code ends ####
Agent.learn=learn
So my input is basically from lines 14-24. And to be brutally honest , I will have to change mostly these lines for other algorithms as well!
maxQ1=torch.max(self.qnetwork_local(next_states),0)[0]
maxQ2=torch.max(self.qnetwork_local(next_states),1)[0]
maxQ=maxQ2.reshape(-1,1)
y=rewards+gammatorch.max(maxQ,1)[0](1-dones) # belman equation
loss=F.mse_loss(y,self.qnetwork_local(states).gather(1,actions)) #bellman update equation self.optimizer.zero_grad() # gradient descent loss.backward() self.optimizer.step() Untrained Agent
BUFFER_SIZE = int(1e5) # replay buffer size
BATCH_SIZE = 64 # minibatch size
GAMMA = 0.99 # discount factor
TAU = 0.01 # for soft update of target parameters
LR = 0.001 # learning rate
UPDATE_EVERY = 4 # how often to update the network
agent=Agent(state_size=state_shape,action_size=action_size,seed=0)
Okay finally! Lets start playing!
Hyperparameters . I copied directly from the Nanodegree repository ..No change
n_episodes=1000
max_t=1000
eps_start=1.0
eps_end=0.1
eps_decay=0.995
"""Deep Q-Learning.
Params
======
n_episodes (int): maximum number of training episodes
max_t (int): maximum number of timesteps per episode
eps_start (float): starting value of epsilon, for epsilon-greedy action selection
eps_end (float): minimum value of epsilon
eps_decay (float): multiplicative factor (per episode) for decreasing epsilon
"""
scores = [] # list containing scores from each episode
scores_window = deque(maxlen=100) # last 100 scores
eps = eps_start # initialize epsilon
for i_episode in range(1, n_episodes+1):
state = env.reset()
score = 0
for t in range(max_t):
action = agent.act(state, eps)
next_state, reward, done, _ = env.step(action)
agent.step(state, action, reward, next_state,done)
state = next_state
score += reward
if done:
break
scores_window.append(score) # save most recent score
scores.append(score) # save most recent score
eps = max(eps_end, eps_decay*eps) # decrease epsilon
print('\rEpisode {}\tAverage Score: {:.2f}'.format(i_episode, np.mean(scores_window)), end="")
if i_episode%10==0:
torch.save(agent.qnetwork_local.state_dict(),"dqn_no_target/dqn_agent{}.pkl".format(i_episode))
if i_episode % 100 == 0:
print('\rEpisode {}\tAverage Score: {:.2f}'.format(i_episode, np.mean(scores_window)))
if np.mean(scores_window)>=200.0:
print('\nEnvironment solved in {:d} episodes!\tAverage Score: {:.2f}'.format(i_episode-100, np.mean(scores_window)))
Episode 100 Average Score: -128.65
Episode 200 Average Score: -117.65
Episode 300 Average Score: -79.61
Episode 400 Average Score: -80.35
Episode 500 Average Score: -93.29
Episode 600 Average Score: -73.52
Episode 700 Average Score: -94.73
Episode 800 Average Score: -99.54
Episode 900 Average Score: -128.28
Episode 1000 Average Score: -115.67
saving the scores
scores_np=np.array(scores)
np.savetxt("dqn_no_target/scores.txt",scores_np)
moving average function
def moving_average(a, n=100) :
ret = np.cumsum(a, dtype=float)
ret[n:] = ret[n:] - ret[:-n]
return ret[n - 1:] / n
function for plotting the moving average
def plot_scores(scores):
scores_ma=moving_average(scores,n=100)
plt.plot(np.arange(len(scores_ma)), scores_ma)
plt.ylabel('Score')
plt.xlabel('Episode')
plt.show()
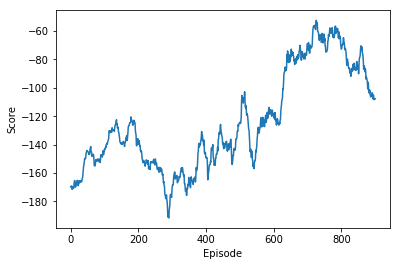
plot_scores(scores)
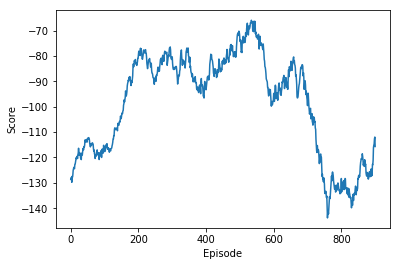
From the above plot, we see that , rewards are improving , but the reward vs episode curve is not stable
Let’s visualize the model
agent.qnetwork_local.load_state_dict(torch.load("dqn_no_target/dqn_agent1000.pkl"))
Why so unstable?!
There is a problem in the learning. the learning section shows, in line 15 and 19. We are getting the target value of the network from the same network! There are two problems with it
- For normal neural network training , the target is fixed. But in this case the target itself is moving!!! Suppose , if we are trying to catch a cow. If the cow is fixed in a position, it is easier to catch it. But if the cow starts moving with our every step, then it is harder !
- Another problem is overestimation! Suppose, if Q network gives a bad future state a good value. As the Q(next_state) is the target, the model will try to learn the weights such that it gives the future states bad value! So there is a chance of always giving bad states good values and not learning at all!
So the solution? Add target Network!!!
DQN with Target Network
but wait! lets make the learning code a function for future use!
def train_agent(agent,env,target_folder,eps_start=eps_start,eps_decay=eps_decay,eps_end=eps_end,gamma=gamma,n_episodes=n_episodes,max_t=max_t):
"""Deep Q-Learning.
Params
======
n_episodes (int): maximum number of training episodes
max_t (int): maximum number of timesteps per episode
eps_start (float): starting value of epsilon, for epsilon-greedy action selection
eps_end (float): minimum value of epsilon
eps_decay (float): multiplicative factor (per episode) for decreasing epsilon
"""
scores = [] # list containing scores from each episode
scores_window = deque(maxlen=100) # last 100 scores
eps = eps_start # initialize epsilon
for i_episode in range(1, n_episodes+1):
state = env.reset()
score = 0
for t in range(max_t):
action = agent.act(state, eps)
next_state, reward, done, _ = env.step(action)
agent.step(state, action, reward, next_state,done)
state = next_state
score += reward
if done:
break
scores_window.append(score) # save most recent score
scores.append(score) # save most recent score
eps = max(eps_end, eps_decay*eps) # decrease epsilon
print('\rEpisode {}\tAverage Score: {:.2f}'.format(i_episode, np.mean(scores_window)), end="")
if i_episode%10==0:
torch.save(agent.qnetwork_local.state_dict(),"{}/dqn_agent{}.pkl".format(target_folder,i_episode))
if i_episode % 100 == 0:
print('\rEpisode {}\tAverage Score: {:.2f}'.format(i_episode, np.mean(scores_window)))
if np.mean(scores_window)>=200.0:
print('\nEnvironment solved in {:d} episodes!\tAverage Score: {:.2f}'.format(i_episode-100, np.mean(scores_window)))
return scores
Let’s initialize a target network
agent.qnetwork_target = QNetwork(state_size=state_shape,action_size=action_size,seed=0).to(device)
let’s change the learn method, notice, I am changing only the line 15 and I am adding new method soft_update to update the target network
def learn(self, experiences, gamma):
"""Update value parameters using given batch of experience tuples.
Params
======
experiences (Tuple[torch.Tensor]): tuple of (s, a, r, s', done) tuples
gamma (float): discount factor
"""
states, actions, rewards, next_states, dones = experiences
"*** YOUR CODE HERE ***"
### My code starts###
maxQ1=torch.max(self.qnetwork_target(next_states),0)[0]
maxQ2=torch.max(self.qnetwork_target(next_states),1)[0]
maxQ=maxQ2.reshape(-1,1)
y=rewards+gamma*torch.max(maxQ,1)[0]*(1-dones)
loss=F.mse_loss(y,self.qnetwork_local(states).gather(1,actions))
self.optimizer.zero_grad()
loss.backward()
self.optimizer.step()
self.soft_update(self.qnetwork_local, self.qnetwork_target, TAU)
def soft_update(self, local_model, target_model, tau):
"""Soft update model parameters.
θ_target = τ*θ_local + (1 - τ)*θ_target
Params
======
local_model (PyTorch model): weights will be copied from
target_model (PyTorch model): weights will be copied to
tau (float): interpolation parameter
"""
for target_param, local_param in zip(target_model.parameters(), local_model.parameters()):
target_param.data.copy_(tau*local_param.data + (1.0-tau)*target_param.data)
Agent.learn=learn
Agent.soft_update=soft_update
so let’s start learning again!
Initializing the agent
agent.__init__(state_size=state_shape,action_size=action_size,seed=0)
scores=train_agent(agent,env,"dqn_with_target")
Episode 100 Average Score: -169.63
Episode 200 Average Score: -143.38
Episode 300 Average Score: -139.81
Episode 400 Average Score: -169.21
Episode 500 Average Score: -149.34
Episode 600 Average Score: -124.22
Episode 700 Average Score: -120.15
Episode 800 Average Score: -68.99
Episode 900 Average Score: -72.74
Episode 1000 Average Score: -107.78
plot_scores(scores)
Above one looks better than the dqn without result. But still unstable
scores_np_dqn_with_target=np.array(scores)
np.savetxt("dqn_with_target/scores.txt",scores_np_dqn_with_target)
Let’s plot both scores together
plt.figure()
scores_ma_no_target=moving_average(scores_np,n=100)
scores_ma_with_target=moving_average(scores_np_dqn_with_target,n=100)
plt.plot(np.arange(len(scores_ma_no_target)), scores_ma_no_target,label="Without target")
plt.plot(np.arange(len(scores_ma_with_target)), scores_ma_with_target,label="With target")
plt.ylabel('Score')
plt.xlabel('Episode')
plt.legend()
plt.title("DQN")
Text(0.5, 1.0, 'DQN')

Stability improved , but not enough!!
Let’s think again! Target network improves the stability slightly. But can we do more?! Obviously! Follow the next article, Double Deep Q Network